Implementación de robots colaborativos, robots delta y AMR para la automatización de su planta
En I®GET ofrecemos soluciones integrales de robótica industrial adaptadas a sus necesidades productivas. Implementamos cobots (robots colaborativos), robots delta de alta velocidad y AMR (vehículos guiados autónomos) para transformar sus líneas de producción, logística y empaque.
Nuestro enfoque combina ingeniería de aplicaciones, integración con sistemas existentes, capacitación y soporte continuo, garantizando una automatización segura, flexible y rentable.
Transporte interno con AMR
Los AMR movilizan cargas (contenedores, tarimas, carros) entre almacén, producción y muelles. Navegación autónoma sin rieles ni cintas magnéticas. Se integran con WMS o ERP para activar rutas según demanda.
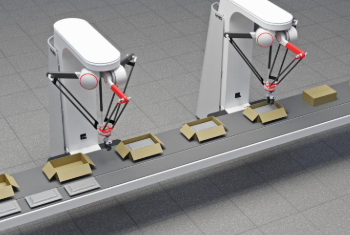
Pick and place en fin de línea con robots Delta
En la salida de la producción, los robots delta toman productos desde una banda transportadora y los colocan en cajas, bandejas o envases a velocidades imposibles de igualar manualmente. Ideales para alimentos, componentes electrónicos, farmacia o piezas pequeñas.
Integración de software: Plataformas como iPaaS (Plataforma de Integración como Servicio) permiten conectar aplicaciones sin necesidad de programación, facilitando la sincronización de datos entre sistemas.
Estaciones colaborativas para picking mixto
Un cobot puede asistir a un operario en procesos de “goods-to-person” (producto que llega al operario) o “person-to-goods”. El robot presenta las bandejas correctas, indica la ubicación y el operario confirma la extracción, reduciendo errores y fatiga.
Beneficios tangibles de la implementación
Otras aplicaciones clave
Paletizado colaborativo: Cobots que apilan cajas de distintos tamaños en tarimas.
Inspección de calidad: Cámaras integradas en robots delta o cobots para verificar etiquetas, sellos o dimensiones.
Reabastecimiento de líneas justo a tiempo: AMR que entregan consumibles (cajas, film, etiquetas) cuando se necesitan.
Por donde empezar?
No todas las aplicaciones necesitan los tres tipos de robot. El primer paso es un análisis de procesos para identificar:
Cuellos de botella (transporte, picking lento, errores en fin de línea).
Tareas de alto volumen o ergonomía crítica.
Compatibilidad con la infraestructura actual.
Diseñamos una solución híbrida: AMR para mover, Delta para velocidad y Cobot para flexibilidad. Integramos todo con tu sistema de gestión (SAP, WMS, MES) y capacitamos a tu equipo.
¿Necesita ayuda en sus procesos industriales? Nosotros somos expertos